PRÁCTICA Nº 09:"LEGO DIGITAL DESIGNER"
I. CONTENIDO
En esta guía de laboratorio se expondrá la utilización del lego
digital designer y la rendeerización del prototipo que se armara en el transcurso de la practica
II. OBJETIVOS ESPECÍFICOS
- Utilización del programa lego digital deisgner
- Creación guía de armado el prototipo
III. MATERIAL Y EQUIPO
- 01 computador con Lego digital designer instalado.
IV. FUNDAMENTO TEORICO
 LEGO Digital Designer o también conocido como LDD es un software libre desarrollado por The Lego
Group, disponible para Mac y Windows.
LEGO Digital Designer o también conocido como LDD es un software libre desarrollado por The Lego
Group, disponible para Mac y Windows.
Permite diseñar a través del PC cualquier construcción de LEGO. Cuenta con un número
ilimitado de piezas de todo tipo, y la mayoría están disponibles en varios
colores. Su interfaz es muy fácil de usar. Incluye temas de series de productos
como Mindstorms o Creator.
Ofrece diseños predeterminados sin acabar (para que lo haga el usuario).
Permite guardar los diseños en el formato .lxf.
El
programa también ofrece la opción de generar guías de construcción, de modo que
puede hacer instrucciones automáticamente de cómo construir paso a paso las
creaciones, incluso con la opción de guardarlas en formato HTML. También nos dice cuánto
costaría crear la construcción en la realidad. Podremos guardar nuestras
creaciones y compartirlas, enviarlas a la página oficial de LEGO y también
permite visualizar y descargar las creaciones de otras personas que las hayan
subido previamente
La aplicación pesa 1 GB aproximadamente.
 Actualmente, la versión extendida (la en negro) incluye piezas de Lego
Mindstorms, The Lego
Movie, Lego Minifigures, Lego Teenage Mutant Ninja Turtles, Lego
Cars 2, Lego Ferrari (Promoción de Shell para viajar a Legolandia), Lego Star Wars,
Lego Mixels, Lego Chima, Lego Spongebob Squarepants, Lego DC Super Heroes/Lego
Batman, Lego Marvel Super Heroes, Lego Minecraft (Nota: Las piezas en este tema
aparecieron en temas anteriores que también son de Lego, y además que este tema
fue lanzado en el cumpleaños de Notch), Lego Galaxy Squad, Lego Bionicle, Lego
Hero Factory, Lego Dino, etc...
Actualmente, la versión extendida (la en negro) incluye piezas de Lego
Mindstorms, The Lego
Movie, Lego Minifigures, Lego Teenage Mutant Ninja Turtles, Lego
Cars 2, Lego Ferrari (Promoción de Shell para viajar a Legolandia), Lego Star Wars,
Lego Mixels, Lego Chima, Lego Spongebob Squarepants, Lego DC Super Heroes/Lego
Batman, Lego Marvel Super Heroes, Lego Minecraft (Nota: Las piezas en este tema
aparecieron en temas anteriores que también son de Lego, y además que este tema
fue lanzado en el cumpleaños de Notch), Lego Galaxy Squad, Lego Bionicle, Lego
Hero Factory, Lego Dino, etc...
V. PROCEDIMIENTO
Primero veamos dónde tenemos que
ingresar para poder trabajar específicamente con el lego mindstomrs NXT 2.0:
Antes de ingresar al armado para poder trabajar específicamente
con el lego NXT 2.0 tendremos que darle clic al rectángulo rojo que está
marcado en la imagen para que seguidamente le demos clic en el rectángulo amarillo
como se ve en la imagen.

Luego de ya haber entrado, se nos presentara una
imagen como está a el cual le daremos clic en el recuadro amarillo para
seguidamente darle clic en el rectángulo rojo, este procedimiento es para poder
trabajar con las piezas de lego mindstomrs NXT 2.0 no necesariamente tendremos
que trabajar con esas ya que podemos trabajar con otras piezas de diferentes
legos, para esta práctica necesitaremos las piezas del lego mindstorms.

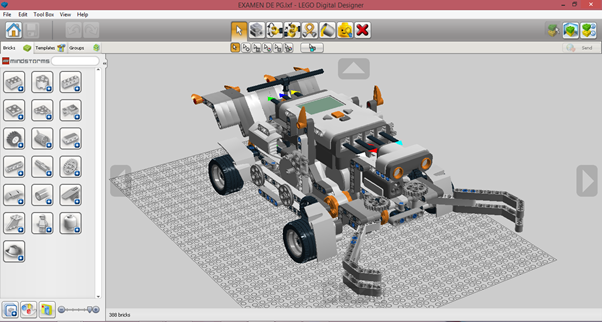
A continuación tendremos que realizar un prototipo
de robot tomando en cuenta que tenga
ruedas para que así pueda movilizarse.
El modelo terminado:

Después de haber terminado el armado del robot tendremos
que diseñar una Guía de armado el cual el mismo Lego digital designer crea la guía
de armado del prototipo que realizamos.
A continuación se mostrara el procedimiento para ver
cómo crear la guía de armado:
Tendremos que darle clic en el recuadro rojo para después
que por si solo se cree la guía de armado.

Después de haber dado clic en el recuadro rojo nos
mostrara la guía de armado del robot el cual es de mucha utilidad para que
otras personas puedan realizar el armado o poder modificarlo.

Luego de haber realizado nuestro armado y la guía procederemos
a renderizar la imagen de nuestro lego ello nos ayudara un programa llamado
bluerender el cual ayuda a que la imagen de nuestro robot se vea mejor.
Estas son unas capturas con el bluerender:



Como podemos apreciar la calidad de imagen es muy
buena que si lo comparamos con las imágenes normales de nos brinda el lego
digital no se muestra tan bien como estas.
VI. CONCLUCIONES
Podemos concluir que el LDD tiene una gran utilidad ya que sirve para
crear infinidades de modelos los cuales pueden que de acá en un futuro pueda
servir para la sociedad.