PRÁCTICA DE LABORATORIO (robotica) N0 05:"SENSOR DE CONTACTO"
I. OBJETIVOS
► Conocer la teoria del sensor de contacto.
► Conocer el uso del sensor de contacto.
► Implementación del sensor de contacto en un diseño de robot.
II. MATERIALES Y EQUIPO
► 01 Kit de LEGO Mindstorms NXT 2.0.
► 01 Instructivo de Armado del Robot Castor bot, Auto de choque y Robot Explorer.
►Computador con NXT-G Instalado.
III.FUNDAMENTO TEORICO

El sensor de contacto
permite detectar si el bloque que lo posee ha colisionado o no con algún objeto
que se encuentre en su trayectoria inmediata. Al tocar una superficie, una
pequeña cabeza externa se contrae, permitiendo que una pieza dentro del bloque
cierre un circuito eléctrico comience a circular energía, provocando una
variación de energía. Util para hacer
alguna ación manualmente (un boton).
(fig. 1)
IV. PROCEDIMIENTO
Para la Utilización del sensor de contacto, se puede hacer por el medio del bloque "Touch Sensor "





(fig. 2)
O también por el medio del bloque "Wait", configurando como control el "Touch Sensor"
(fig. 3)

(fig. 4)
Para la presente práctica, se hará el armado de tres "bonus models" del NXT. Para cada uno de ellos se propondrá una secuencia de pasos que deberá terminar en el diseño de una programa para cada uno.
CASTOR BOT
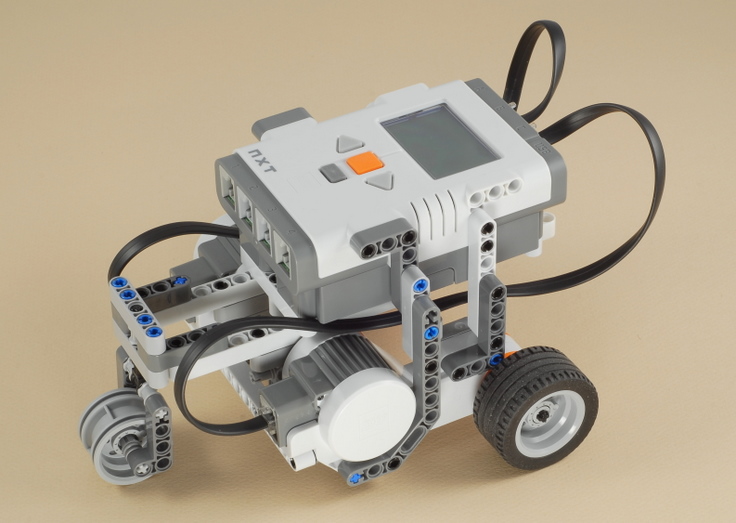
(fig. 5)
El
Castor Bot es un robot de tracción en dos básico de motores con una
construcción robusta que se convierte con facilidad. Se puede utilizar
como punto de partida para sus propios proyectos, y programar.
Empezamos con el armado
El programa sugerido para el funcionamiento del robot , es el siguiente.

(fig. 6)
BUMPER CAR
Utilice el programa del coche de
parachoques de su auto de choque. Este sencillo programa
le dice al robot para seguir recto hasta el parachoques golpea algo, a
continuación, una copia de seguridad un poco, gire a la derecha, a
continuación, volver a ir directamente de nuevo (repetir para siempre). Este
programa sería fácil de modificar con sus propias ideas de qué hacer cuando el
robot choca contra algo.
Empezamos con el armado
El programa sugerido para el funcionamiento del robot , es el siguiente.

(fig. 7)
Como podemos apreciar Todo el programa se realizara en un bucle infinito.
a) El robot Avanzará hasta que se presione el sensor de contacto para después retroceder 1 segundo.
b) Luego hará un giro de 450 grados hacia el lado derecho.
c)Esto se repitiera infinitamente ya que vemos que todo el programa esta encerrado en un bucle infinito.
EXPLORER
La misión"Eplorer"s explorar todo el alrededor, en cualquier lugar que se le suelte. Se trata de que el robot "vea " las paredes
y otros obstáculos antes de toparse con ellos, y luego vuelve a girar la cabeza para mirar de izquierda a derecha para determinar en qué dirección debe dirigirse. En caso de que accidentalmente se chocase con algo, su parachoques en la parte delantera activa el sensor tactil para realizar la parda del robot y luego qué camino debe tomar.
Empezamos con el Armado
Para este Robot serán los siguientes RETOS:
•Avanzar hasta que el sensor de contacto sea pulsado o hasta que se detecte un obstáculo a 15 cm.
•Si el sensor de contacto fue presionado, enviar el sonido "Sorry" y retroceder.
•Girar el cuello del robot 90 grados, y medir con el sensor ultrasónico la distancia, girar el cuello del robot 180 grados y medir nuevamente con el sensor ultrasónico la distancia. Comparar.
•Girar el robot hacia el lado donde no haya obstáculos.
El programa sugerido para el funcionamiento del robot, es el siguiente:

(fig. 8)
Explicación del diagrama:
•Antes que nada todo el programa se realizara en un bucle infinito, el cual también podemos modificarlo y ponerlo cuantas veces queremos o cuanto tiempo.
•Entrará al programa y nos encontraremos con un comando el cual es un servomotor con formado por los puertos By C que avanzara hasta que detecte un objeto a 15 cm o puede ser que se haya topado cun objeto con su parachoque la cual realizara otra acción.
•Después de haber detectado el objeto preguntara si esta a una distancia de 15 cm, si es verdad se detendrá por un momento, emitirá un sonido de "Sorry" para luego llamar a la función MIRADOR(fig. 9), y si es falso preguntara Si el sensor de contacto fue presionado, si es verdad se dentendra por un momento para después emitir un sonido "Sorry"y llamara a la función PARACHOQUE(fig. 10), y si es falso no hará nada.
•Esto se repitiera infinitamente.
FUNCIÓN MIRADOR

(fig. 9)
Explicación del diagrama (MIRADOR):
•Antes que nada este diagrama es secuencial por lo cual no se repitiera varias veces
•Empezará con el motor A el cual dara un giro de 90 grados y medirá una distancia de 15 cm.
•Dará otro giro de 180 grados y medirá una distancia de 15 cm , luego regresará a su lugara correspondiente con un giro de 90 grados.
•Luego Comparará la primera medición con la segunda (A < B), después de haber comparado preguntará si es verdad o falso , si es verdad dará un giro hacia el lado derecho de 4 segundos y si es falso dará un giro hacia el lado izquierdo de 4 segundos.
FUNCIÓN PARACHOQUE

(fig. 10)
Explicación del diagrama (PARACHOQUE):
•Antes que nada este programa también es secuencial por lo cual tampoco se realizara en un bucle infinito.
•Primero Retrocederá un segundo para después llamar a la función MIRADOR(fig. 9)
Este es un vídeo con el primer caso el cual es de detectar un objeto y mirar para que lado debe dirigirse.
Así es como nos debe correr el Programa.


























 Sensor de sonido: se lo utiliza para reaccionar a sonidos del ambiente. Por ejemplo para que accione sus motores cuando percibe un aplauso.
Sensor de sonido: se lo utiliza para reaccionar a sonidos del ambiente. Por ejemplo para que accione sus motores cuando percibe un aplauso.
















{kind=link}
{kind=link}